官方微信:日成最新资讯
官方微信:日成最新资讯 移动官网
移动官网 官方商城
官方商城现在,智能机器人在轨道交通行业已有哪些应用?
未来,如何看待轨道交通智能机器人的发展趋势?
随着高精度传感器、专家系统、机器人视觉等机器人重要部件可靠性的提升,机器人代替简单劳动力必将是大势所趋。
轨道交通行业虽然比较传统,但在智能化机器人的应用方面也迈出了不小步伐,我们收集了过去一年中发生的部分案例:
方案1
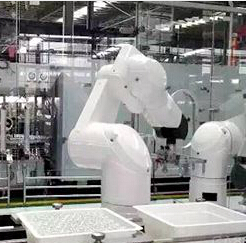
名称:智能挖掘机器人(布洛克多功能暗挖机器人)
时间:2017年2月
应用状态:已应用于西安地铁四号线火车站暗挖隧道工程

2017年2月5日上午,伴随着“智能挖掘机器人”的轰鸣声,西安地铁四号线火车站暗挖隧道左线被顺利打通。至此,火车站暗挖隧道实现双向贯通,成为国内首例极端地质条件的下穿铁路道岔工程。
西安地铁四号线火车站暗挖隧道工程属世界性难题。为此,施工方探索运用暗挖机器人、智能设备检测、分段深孔注浆等技术,为工程安全提供全方位保障。经过四年时间努力,终于将260.7米的隧道成功打通,做到对列车运行“零影响”。
中铁一局西安地铁四号线11标项目部遥控操作工朱琪科:“(挖掘机器人)远程操控,它的安全距离是100米。它更加精准、更加安全,动作灵活、动作多。”
根据介绍,机器人只需要一名技术人员拿着一个“游戏手柄”来操作即可,至少节省人力在三分之一以上,工效提升一倍,最重要的是施工安全风险大大降低。
中铁一局西安地铁四号线11标项目经理梁西军:“像这样的测量机器人,总共布置了28台,然后这个监视测点,总共在站场影响范围内布了3298个监测点。同时,通过全段面的深孔注浆加固,起到止水和稳固土壤的作用。”
2017年2月5日上午,伴随着“智能挖掘机器人”的轰鸣声,西安地铁四号线火车站暗挖隧道左线被顺利打通。至此,火车站暗挖隧道实现双向贯通,成为国内首例极端地质条件的下穿铁路道岔工程。
西安地铁四号线火车站暗挖隧道工程属世界性难题。为此,施工方探索运用暗挖机器人、智能设备检测、分段深孔注浆等技术,为工程安全提供全方位保障。经过四年时间努力,终于将260.7米的隧道成功打通,做到对列车运行“零影响”。
中铁一局西安地铁四号线11标项目部遥控操作工朱琪科:“(挖掘机器人)远程操控,它的安全距离是100米。它更加精准、更加安全,动作灵活、动作多。”
根据介绍,机器人只需要一名技术人员拿着一个“游戏手柄”来操作即可,至少节省人力在三分之一以上,工效提升一倍,最重要的是施工安全风险大大降低。
中铁一局西安地铁四号线11标项目经理梁西军:“像这样的测量机器人,总共布置了28台,然后这个监视测点,总共在站场影响范围内布了3298个监测点。同时,通过全段面的深孔注浆加固,起到止水和稳固土壤的作用。”
总结一下:
方案2
名称:地铁智能机器人“小轨”、“小D”
时间:2017年8月
应用状态:二次优化研发完成 
2017年8月7日,一位名叫“小D”的智能机器人在地铁2号线宁波火车站为乘客查询票价、打印线路图、拎东西。这款由宁波企业与宁波轨道交通联合自主研发的机器人,成为宁波地铁助推智能制造的缩影。
“小D正在努力成为一名独立的、合格的车站服务工作者。”宁波地铁企划部工作人员莫璐洁表示。据介绍,地铁宁波火车站工作日每天有三万多人次进出站,节假日9万多人次进出站,该站客服中心和咨询台的三名工作人员每天要为三分之一的乘客提供咨询。小D的加入,不但能帮助站务人员分担一些重复性的咨询工作,还创新了回复乘客咨询的方式。
小D入选宁波市政府“3315”计划创业团队自主研发的专门针对地铁服务的行业机器人,拥有多个知识产权。
事实上,在小D之前,已经有一款机器人(“小轨”)在轨道交通1号线樱花公园站提供过服务,经过一段时间的试用,地铁机器人“回炉”优化,在服务能力上越来越智能化。此次小D拥有更独特的功能,比如能够打印出行便条,并且能够帮助乘客拎一定重量的行李,还能收集乘客的各类意见建议。
总结一下:
方案3
名称:地铁智能机器人YoYo
时间:2017年12月
应用状态:投入试点

2017年12月5日,地铁智能机器人 YoYo 在广州地铁八号线万胜围站、琶洲站和广州塔站投入试点,引得大量乘客驻足围观。
该智能机器人运用了科大讯飞国际领先的智能语音技术,可以实现通过语音交互让机器人提供简单的问询服务,包括换乘路径、地铁票价和票务政策、线网首末班车查询、出入口资讯查询等,乘客可通过机器人界面的唤醒按钮实现自助查询服务。
“YOYO 机器人作为车站人工咨询服务的有效补充,能在一定程度上减少乘客人工问询的等候时间,提高搭乘效率。”刘舒说。据统计,广州地铁每天有超过 1000 名员工在一线服务乘客,承担着服务 800 万客流的重担,每天接受问询上万次。
总结一下:
方案4
名称:“开路者”智能巡检机器人
时间:2017年10月
应用状态:处于研发阶段,计划明年批量生产投放
在2017年10月的一次展会上,“开路者”智能巡检机器人首次对外亮相,吸引众人围观。
“智能巡检开始。”上午10点,长沙市轨道交通集团有限公司展位里,来自运营公司通号部的张小虎对着手机APP发出口令后,一台身高不到成年人膝盖的机器人从墙边出发,墙上屏幕开始同步显现从它视角看到的现场画面。先敬个礼、再跳上一段舞后,这台名为“开路者”的机器人开始了现场“巡检”,萌萌的造型吸引了不少人。张小虎介绍,“开路者”目前具备有远程控制、视频回传、巡迹、温湿度探测等六大功能,未来将主要用于机房无人化巡检——以往每个车站的每次周检都需要两个人,以后都可以交给“开路者”了。目前处于研发阶段,计划明年批量生产并投放进各个地铁站的机房。

方案5
名称:轨道车辆智能检修系统
时间:2017年12月
应用状态:研发成功,刚启动对外推广

检修设备展示现场
2017年12月6,由中车青岛四方车辆研究所有限公司(中车四方所)研制的轨道车辆智能检修系统对外亮相,极大提高列车的故障识别与检测效率。
该系统包括控制中心和图像采集机器人两大部分,控制中心收集整理采集的图像、调度整个检查工作过程;图像采集机器人采集列车各部位的检测信息,它主要由智能运载平台、多自由度柔性机器手臂、相机、传感器,监控摄像头等部分组成。
该系统是世界上第一台利用高度柔性机器人与机器视觉融合技术,完全按照高速列车检修标准或城市轨道列车检测标准,实现车辆各部位视觉检查作业的设备。
当列车入库进行检修时,启动图像采集机器人进行自检,机器人匀速前行到达车头位置时,机器人自动对车辆底部进行图像检测,采集车底图片;当机器人到达车尾定点位置后,机器人伸出机器手臂并逆向行驶,机器人发出的激光定位到转向架位置后,机械臂按照预定设计进入转向架和车辆底部的狭窄空间,开始采集列车关键部位图片,同时在机械手臂随着机器人前行采集图片时,机器人自动开启面阵相机,进行更为详实的底部高清拍摄。该智能检修系统相比于传统人工作业,可增加40%以上的检修范围,降低漏检率,提高检修效率。列车采集信息会实时显示在控制中心显示器上,采集完成后,机器人自动回复至初始位置并关机。

智能化设备组成示意图
该系统有三大法宝,确保检查工作的高效、高质,即高清图像采集清晰,故障识别处理准确和多种驱动模式兼容。
法宝1:高清图像采集清晰。图像采集机器人可以采集转向架各个方向上关键部位的高清图像,多自由度柔性机械臂携带图像采集装置采集转向架顶部、侧面和底部高清图像,同时线扫相机采集整个车体底部高清图像,面阵相机采集转向架底部高清图像,确保全面覆盖车辆待检查区域。
智能化设备扫描影像
法宝2:故障识别处理准确。通过采用先进的图像特征识别技术和机器深度学习技术,极大的提高故障识别准确度。采集到的高清图像通过无线网络实时传输到控制中心,并利用图像识别算法对图像进行自动故障判断,例如部件丢失、螺栓松动、异物、断裂、尺寸磨耗等,系统能及时将信息自动反馈给检修人员进行核实。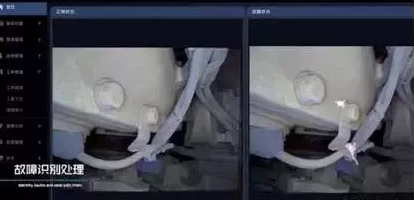
影像识别和学习技术
法宝3:多种驱动模式兼容。图像采集机器人根据检修作业不同条件,可采用挂式或在地面铺设钢轨两种方式进行工作,兼容多种工况需求,还可以根据用户需求,量身定制检修模式。
总结一下: 方案6
方案6
名称:地铁智能机器人“晶晶”
时间:2018年1月
应用状态:初亮相
2018年1月16日下午,郑州市区紫荆山地铁站内,由郑州地铁举办的2017年“晶晶服务”责任报告发布会上,来了一位特殊的明星“晶晶”——即将应用于地铁站台内的郑州地铁智能机器人。
此次在紫荆山地铁站亮相的共有两台机器人。这两部机器人均是白色,上体有两肢,下体则是轮子代脚。脸部为小型黑色屏幕,有黄色的电子眉眼。前胸是一个屏幕,上面显示着机器人的各种功能:左上角有时间和天气,下面有线路查询、本站信息查询、运行时间、票价政策、乘车须知、失物招领、语音查询、机器人领路等。机器人得到指令,能够完成屈臂、前行等移动功能。
据了解,该智能机器人可以通过语音交互提供简单的问询服务,包括换乘路径、线网首末班车查询、出入口公交信息查询等,乘客可通过机器人界面的唤醒按钮自助查询。以后,机器人还有望实现自我学习、自我进化,为广大乘客提供更全面、更人性化的服务。
这是机器人“晶晶”首次公开露面,郑州地铁也将成为中部地区率先引进机器人服务的地铁。此次只是在紫荆山地铁站亮相,具体将来安置在哪些地铁站,什么时候开始正式服务,郑州地铁将按照具体情况进行安排。
总结一下: 方案7
方案7名称:能够在地下空间进行钻孔、机动操纵、定位、导航的机器人系统 “BADGER”
时间:2017年
应用状态:尚没有任何原型硬件的展示
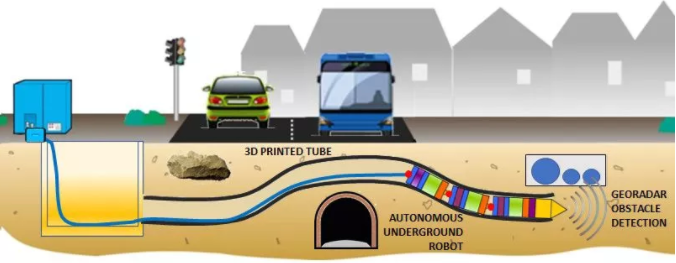
BADGER (roBot for Autonomous unDerGround trenchless opERations),是一种能够在地下空间进行钻孔、机动操纵、定位、导航的机器人系统。
根据该项目的设计者介绍,灵感来自那些通过挖掘隧道来生活的自然动物,可用于帮助人类开拓更多的地下空间。尽管这听起来很酷,不过从设计图上来看,这款机器人给人的感觉就像是——一条巨大的蚯蚓。
目前有关地下的工作都得依靠建筑公司来进行,采用各种挖掘机械来进行打洞、安装管道和电缆。但这也往往有局限性:通常建筑公司使用的机械设备无法独立导航,无法检测岩石、管道、建筑地基等障碍物,常常需要依靠人类来确定挖掘的路线。
此外,这些传统的机器通常设计为直线行进,不能构建绕组、复杂的隧道网络。所以,建筑公司往往需要挖开一条露天沟渠,将管道安装在沟渠里,然后再填土覆盖,如此建筑成本也很高昂。
相比之下 ,BADGER 则显得智能很多。它能够自主在地下挖洞,为管道挖好渠道,依据现有的地况自主导航,能避开岩石及其他地下管道设施,尾部还能即时 3D 打印管壁,无需人工浇筑管道。
这样一个机器人钻进机的原理就是旋转与冲击钻进技术的结合,在机器人前方会有一个旋转的钻头,在强力旋转与冲击的力量下分解前方的土壤及岩石,粉碎的土壤及岩石将被吸起并从机器人背面的管道排到地面,以保证隧道内部的通畅。前方空间空出来后,机器人会像蠕虫般向前推动。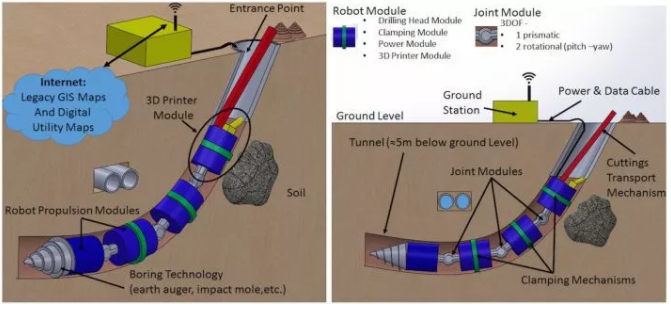
机器人的整个身体是模块化的,其中包含驱动模块、关节模块、及工具模块,会分别根据作业要求进行任务切换。在作业上方的地表装有强穿透性的雷达天线阵列,通过电子导航传感器和激光器等设备帮助指导地下机器人的正常运行。
BADGER 项目的人员来自五个欧洲国家的七个科研机构,由马德里卡洛斯三世大学(Carlos III of Madrid)机器人实验室的 Carlos Balaguer 教授、Santiago Martínezde la Casa 教授和Carmede Andrés Sanchis 教授牵头开展合作。这个项目已于今年 1 月正式启动,并且已经为未来三年的工作计划筹集了 370 万欧元的支持资金,目前尚没有任何原型硬件的展示。
说不定在未来,钻地挖洞修地铁的事,就可以交给这样的机器人了。只是也会很担心会不会有一天早上醒来,发现某条程序错乱的机器人钻到自己家的客厅来了;看着它露出尖尖的脑袋无辜的望着自己,这感觉真是既奇妙又尴尬。
总结一下:

当然了,上面介绍的都只是国内轨道交通行业对机器人的研究或应用。事实上,在国外,也已经有了不少机器人的应用。比如2008年就报道过,韩国首尔尝试过上岗地铁站内向导机器人;2016年,日本东京地铁站近日透露,为了强化对乘客的向导工作,决定从2016年12月1日至2017年3月31日期间,在上野站试验投入使用可提供多语种向导的人形机器人“Pepper”;2017年3月,俄罗斯首都莫斯科地铁决定使用名为Metrosha的机器人,在城市主要地铁站迎接到达的旅客……

近日,美国《世界日报》编译称,CNN财讯的一篇研究报告,指出人工智能机器人,将于未来五年至十年开始取代许多性质重复单调的工作,美国将有许多工作由机器人来做,以拉斯维加斯为例,到2035年,拉斯维加斯65%的工作都要被机器人取代。
就轨道交通行业来说,智能机器人带给我们的也许是半喜半忧。喜的是更多重复单调、甚至是危险的工作将可以交给智能机器人来执行;忧的是许多人将可能就此失业,需要另觅前途。但无论如何,智能机器人在轨道交通行业的应用将是一个不可逆转的潮流。
轨道交通与智能机器人的融合,你,准备好了吗?