















 官方微信:日成最新资讯
官方微信:日成最新资讯 移动官网
移动官网 官方商城
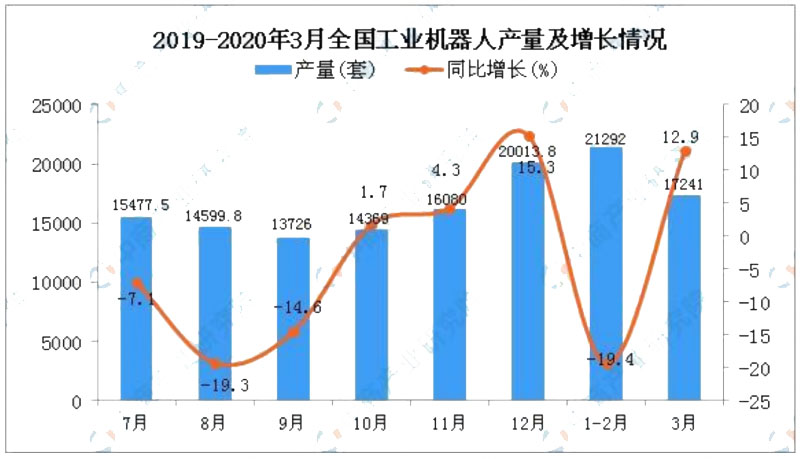
官方商城据中商产业研究院数据库显示,2020年1季度全国工业机器人产量波动幅度较小,2020年3月全国工业机器人产量为17241套,同比增长12.9%。2020年1季度全国工业机器人产量为34645.3套,同比下降8.2%。
数据来源:中商产业研究院数据库
2019-2020年3月全国工业机器人产量统计数据

据中商产业研究院数据库显示,2020年1季度全国工业机器人产量波动幅度较小,2020年3月全国工业机器人产量为17241套,同比增长12.9%。2020年1季度全国工业机器人产量为34645.3套,同比下降8.2%。
数据来源:中商产业研究院数据库
2019-2020年3月全国工业机器人产量统计数据

工业机器人的驱动器主要有步进电机、直流电机、伺服电机、液压驱动和气动驱动。工业机器人主要由机械臂、传感器、驱动器、控制器、抓取器、末端执行器等机构组成。 工业机器人关键技术专利浅析工业机器人的驱动类型工业机器人的驱动器主要有步进电机、直流电机、伺服电机、液压驱动和气动驱动。根据全球排名前20专利权人对各驱动器的专利申请量分布可以看到,对气动驱动方式申请专利最多的是韩国现代,对液压驱动方式申请专利最
到2020年,中国工业机器人保有量将达80万台以上,很多制造业实现了“机器换人”,机器人的大量运用使得制造业减少了大量人工成本,提高了生产效益。制药设备工厂实现“机器换人”,这对于制药设备来说,无论是生产效率,还是生产质量都将实现质的飞跃。以机器人生产机器人将开启制药设备4.0时代。
采用先进适用的铸造新技术,提高铸造装备自动化,特别是工业机器人自动化技术的应用,是铸造企业实施实现可持续发展的关键举措。

为了赶上全球制造业模式变化的步伐,未来的机器人需要提供灵活性和敏捷性,从而在满足越来越分化的客户需求的前提下保持高产能和提高质量。未来智能机器人的特性包括可以应用在不同行业领域中的能力,例如制造业工厂或居家。它们还需要连接到与其他智能设备共享信息的网络,以及具备通过人工智能算法、云和大数据的支持来学习的能力。它们同时也需要一个简单、安全、友好的人机界面(HMI),和可以移动的能力。更加智能的机器人

对于过去的机器人系统来说,选择和放置物体是一个非常困难的任务,因为没有很好的定位方法。但是随着三维视觉的革新发展,定位拾取动作变得越来越轻松了。三维视觉的出现推动了工业机器人的快速创新,拓宽了它们的应用前景。新的视觉技术为机器人系统提供了灵活性,使他们能够完成以前从未有过的功能。工业机器人本身是制造业中令人难以置信的创新,但“盲人”版本的机器人有其局限性。那么三维视觉引导机器人与传统机器人的区别是

现代机器人绝大多数是基于模型控制的(Model-based Control),有模型的地方就会有误差,因此具体有多少误差需要补偿/校准取决于你用了什么样的模型。粗略的,可以把机器人用到的模型分为两个大类即运动学模型和动力学模型,因此误差也可按此划分:分项简单说一下。加工误差会导致: 机器人关节间的连杆长度不准; 配合面不精确造成某些设计为0的参数变成非零; 机械公差:

为了赶上全球制造业模式变化的步伐,未来的机器人需要提供灵活性和敏捷性,从而在满足越来越分化的客户需求的前提下保持高产能和提高质量。未来智能机器人的特性包括可以应用在不同行业领域中的能力,例如制造业工厂或居家。它们还需要连接到与其他智能设备共享信息的网络,以及具备通过人工智能算法、云和大数据的支持来学习的能力。它们同时也需要一个简单、安全、友好的人机界面(HMI),和可以移动的能力。 更加智能的机器
工业机器人和人相比具有质量稳定、长久工作、适应危险肮脏乏味工作等,而本文主要从技术角度来分析目前阶段工业机器人的优劣势: 1. 通用性 工业机器人可编程,支持多自由度运动,因此应用较灵活。虽然不及人类但相对于很多工业自动化常见的专机(专为一类工业应用或一家客户定制的机电集成方案),工业机器人还是灵活多了。工业应用改动不太大时,是可以通过机器人重新编程来满足新的需求,而无需在硬件上再做大量
 官方微信
官方微信