官方微信:日成最新资讯
官方微信:日成最新资讯 移动官网
移动官网 官方商城
官方商城随着智能驾驶的热度逐渐上升,包括中国在内的世界各国已经开始推进相关工作并进行布局,中国的无人驾驶技术也正在逐步走向成熟。但是,智能驾驶在很多方面正面临着挑战。
对此,中国自动化学会理事长、西安交通大学郑南宁院士在论坛中阐述的自己的观点,他认为自主驾驶正面临着不确定性、脆弱性和开放性等诸多问题,应将场景感知和情境认知区别开,从情境认知的角度重新定义自主驾驶。
当下,以智能辅助驾驶和智能安全为代表技术的智能车研究,正在以超乎想象的速度发展。“涉及无人驾驶关键技术的各种新方法和新工艺都在不断地涌现,但是技术上还存在缺陷,全面自主的驾驶技术还处于一种比较早期的阶段,所以面向未来的无人驾驶,要关注的是建立研发和验证技术的核心能力”,西安交通大学人工智能与机器人研究所高级工程师徐林海如是表示。
北京理工大学教授龚建伟认为,为提高自动驾驶车辆的智能决策和控制水平,应当开展决策规划与控制过程中类人知识表达与经验学习研究,突破小样本个性化单一驾驶员学习局限。通过驾驶基元数据采集与建模、环境创建、持续优化学习、测试评价,适应多驾驶员多场景数据学习,实现驾驶员知识与经验在不同场景的泛化。

如今,汽车正越来越快地从机械化向智能化转变。在汽车发展新时代下,打造安全、智能的产品和服务,为用户提供“人—车—生活”智联解决方案,将会成为未来的发展方向。
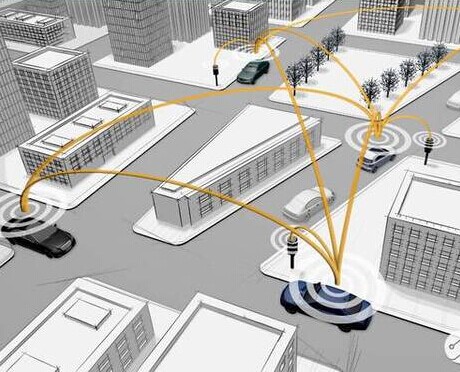
中国自动化学会副理事长兼秘书长、中国科学院自动化研究所王飞跃教授在“平行驾驶”领域探索多年,他提出的用平行技术实现驾驶自动化备受关注。他认为,平行驾驶的最初想法就是要将无人车技术充分利用起来,使之成为辅助人类驾驶的在线“软件机器人”系统,让驾驶变得轻松,关键时刻可以采取措施,避免危险。在王飞跃看来,从平行汽车到平行交通将是面向智能网联发展的趋势与必然。
对于汽车产业而言,在发展的过程中会同时面临产业机遇和能源资源有限等问题,因此如何引导企业的发展方向就显得尤为关键。国家发改委城市中心交通规划院张国华教授认为,能源互联网与智能交通相结合,将有效提高车辆使用及人群出行效率,应努力实现这方面的技术突破,同时要注意政府、企业、公众和智库的四方协同。未来成功的汽车企业一定是利用汽车服务创造新应用和新价值的企业。
文章来源:中国工业新闻网--中国工业报