官方微信:日成最新资讯
官方微信:日成最新资讯 移动官网
移动官网 官方商城
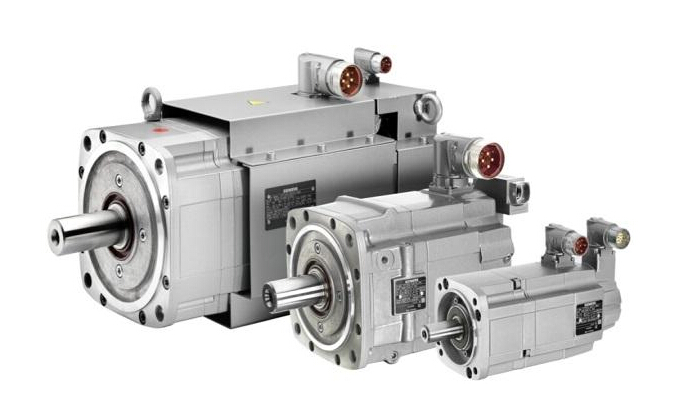
官方商城伺服系统是机电产品中的重要环节,它能提供最高水平的动态响应和扭矩密度,所以拖动系统的发展趋势是用交流伺服驱动取替传统的液压、直流、步进和AC变频调速驱动,以便使系统性能达到一个全新的水平,包括更短的周期、更高的生产率、更好的可靠性和更长的寿命。为了实现伺服电机的更好性能,就必须对伺服电机的一些使用特点有所了解。本文将浅析伺服电机在使用中的常见问题。
问题一
噪声,不稳定
有些使用者在一些机械上使用伺服电机时,经常会发生噪声过大,电机带动负载运转不稳定等现象,出现此问题时,许多使用者的第一反应就是伺服电机质量不好,因为有时换成步进电机或是变频电机来拖动负载,噪声和不稳定现象却反而小很多。表面上看,确实是伺服电机的原故,但我们仔细分析伺服电机的工作原理后,会发现这种结论是完全错误的。
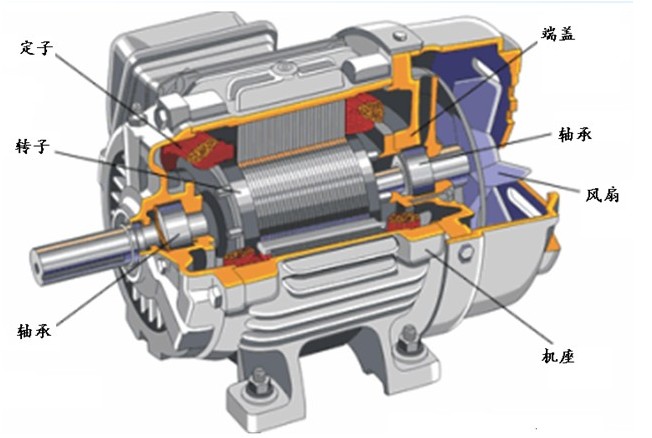
交流伺服系统包括:伺服驱动、伺服电机和一个反馈传感器(一般伺服电机自带光学偏码器)。所有这些部件都在一个控制闭环系统中运行:驱动器从外部接收参数信息,然后将一定电流输送给电机,通过电机转换成扭矩带动负载,负载根据它自己的特性进行动作或加减速,传感器测量负载的位置,使驱动装置对设定信息值和实际位置值进行比较,然后通过改变电机电流使实际位置值和设定信息值保持一致,当负载突然变化引起速度变化时,偏码器获知这种速度变化后会马上反应给伺服驱动器,驱动器又通过改变提供给伺服电机的电流值来满足负载的变化,并重新返回到设定的速度。交流伺服系统是一个响应非常高的全闭环系统,负载波动和速度较正之间的时间滞后响应是非常快的,此时,真正限制了系统响应效果的是机械连接装置的传递时间。
举一个简单例子:有一台机械,是用伺服电机通过V形带传动一个恒定速度、大惯性的负载。整个系统需要获得恒定的速度和较快的响应特性,分析其动作过程:
当驱动器将电流送到电机时,电机立即产生扭矩;一开始,由于V形带会有弹性,负载不会加速到象电机那样快;伺服电机会比负载提前到达设定的速度,此时装在电机上的偏码器会削弱电流,继而削弱扭矩;随着V型带张力的不断增加会使电机速度变慢,此时驱动器又会去增加电流,周而复始。
在此例中,系统是振荡的,电机扭矩是波动的,负载速度也随之波动。其结果当然会是噪音、磨损、不稳定了。不过,这都不是由伺服电机引起的,这种噪声和不稳定性,是来源于机械传动装置,是由于伺服系统反应速度(高)与机械传递或者反应时间(较长)不相匹配而引起的,即伺服电机响应快于系统调整新的扭矩所需的时间。
找到了问题根源所在,再来解决当然就容易多了,针对以上例子,您可以:
(1)增加机械刚性和降低系统的惯性,减少机械传动部位的响应时间,如把V形带更换成直接丝杆传动或用齿轮箱代替V型带。
(2)降低伺服系统的响应速度,减少伺服系统的控制带宽,如降低伺服系统的增益参数值。
当然,以上只是噪起,不稳定的原因之一,针对不同的原因,会有不同的解决办法,如由机械共振引起的噪声,在伺服方面可采取共振抑制,低通滤波等方法,总之,噪声和不稳定的原因,基本上都不会是由于伺服电机本身所造成。
问题二
惯性匹配
在伺服系统选型及调试中,常会碰到惯量问题!具体表现为:
1、在伺服系统选型时,除考虑电机的扭矩和额定速度等等因素外,我们还需要先计算得知机械系统换算到电机轴的惯量,再根据机械的实际动作要求及加工件质量要求来具体选择具有合适惯量大小的电机;
2、在调试时(手动模式下),正确设定惯量比参数是充分发挥机械及伺服系统最佳效能的前题,此点在要求高速高精度的系统上表现由为突出(台达伺服惯量比参数为1-37,JL/JM)。这样,就有了惯量匹配的问题!
问题三
伺服电机选型
在选择好机械传动方案以后,就必须对伺服电机的型号和大小进行选择和确认。
(1)选型条件:一般情况下,选择伺服电机需满足下列情况:
1.马达最大转速系统所需之最高移动转速。
2.马达的转子惯量与负载惯量相匹配。
3.连续负载工作扭力≦马达额定扭力。
4.马达最大输出扭力>系统所需最大扭力(加速时扭力)。
(2)选型计算:
1.惯量匹配计算(JL/JM)。
2.回转速度计算(负载端转速,马达端转速)。
负载扭矩计算(连续负载工作扭矩,加速时扭矩)。